0.0 Readme
本文纯属我自己当笔记用,估计不会很有用吧(笑
1 ROS前置工作
通常各种教程这个时候就会要求用虚拟机或者双系统了,但是我一直觉得这是一个极其令人不解的行为,因为反正是学习,跑的都是仿真,装个双系统也没什么用,还要花掉很大一块硬盘空间,所以这里使用Docker在windows11下面部署ros的虚拟环境,那么图形化就使用vscode,ssh和xming来实现吧。
具体操作在之前的文章如何使用docker在windows上愉悦运行ROS/ROS2 – 天鹅绒房间 (qwqpap.xyz)
2 ROS文件结构
ROS的文件结构,在工作目录下/src中放置自己写的功能包(或者别的包),/build里面是编译项目所需文件,功能包中的/scripts则存放各种Python脚本(解释型语言存疑
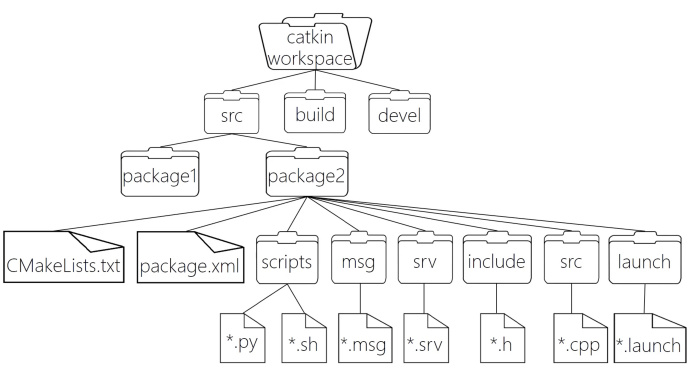
WorkSpace --- 自定义的工作空间
|--- build:编译空间,用于存放CMake和catkin的缓存信息、配置信息和其他中间文件。
|--- devel:开发空间,用于存放编译后生成的目标文件,包括头文件、动态&静态链接库、可执行文件等。
|--- src: 源码
|-- package:功能包(ROS基本单元)包含多个节点、库与配置文件,包名所有字母小写,只能由字母、数字与下划线组成
|-- CMakeLists.txt 配置编译规则,比如源文件、依赖项、目标文件
|-- package.xml 包信息,比如:包名、版本、作者、依赖项...(以前版本是 manifest.xml)
|-- scripts 存储python文件
|-- src 存储C++源文件
|-- include 头文件
|-- msg 消息通信格式文件
|-- srv 服务通信格式文件
|-- action 动作格式文件
|-- launch 可一次性运行多个节点
|-- config 配置信息
|-- CMakeLists.txt: 编译的基本配置
3 ROS通信机制
在ROS中通信方式有多种

Comments 2 条评论
我天你终于开始学了!
图一乐